Linear Gaussian systems¶
We have 2 variables \(x,y\). Let \(x \in R^{D_x}\) be a hidden variable and, \(y \in R^{D_y}\) be a noisy observation of x. Let us assume we have the following prior and likelihood:
Where:
\(A\) is a matrix of size \(D_y \times D_x\). This is an example of a linear Gaussian system \(x \rightarrow y\) meaning x generates y. And we want to study how to invert this arrow, to find out abouty x given we observed some y.
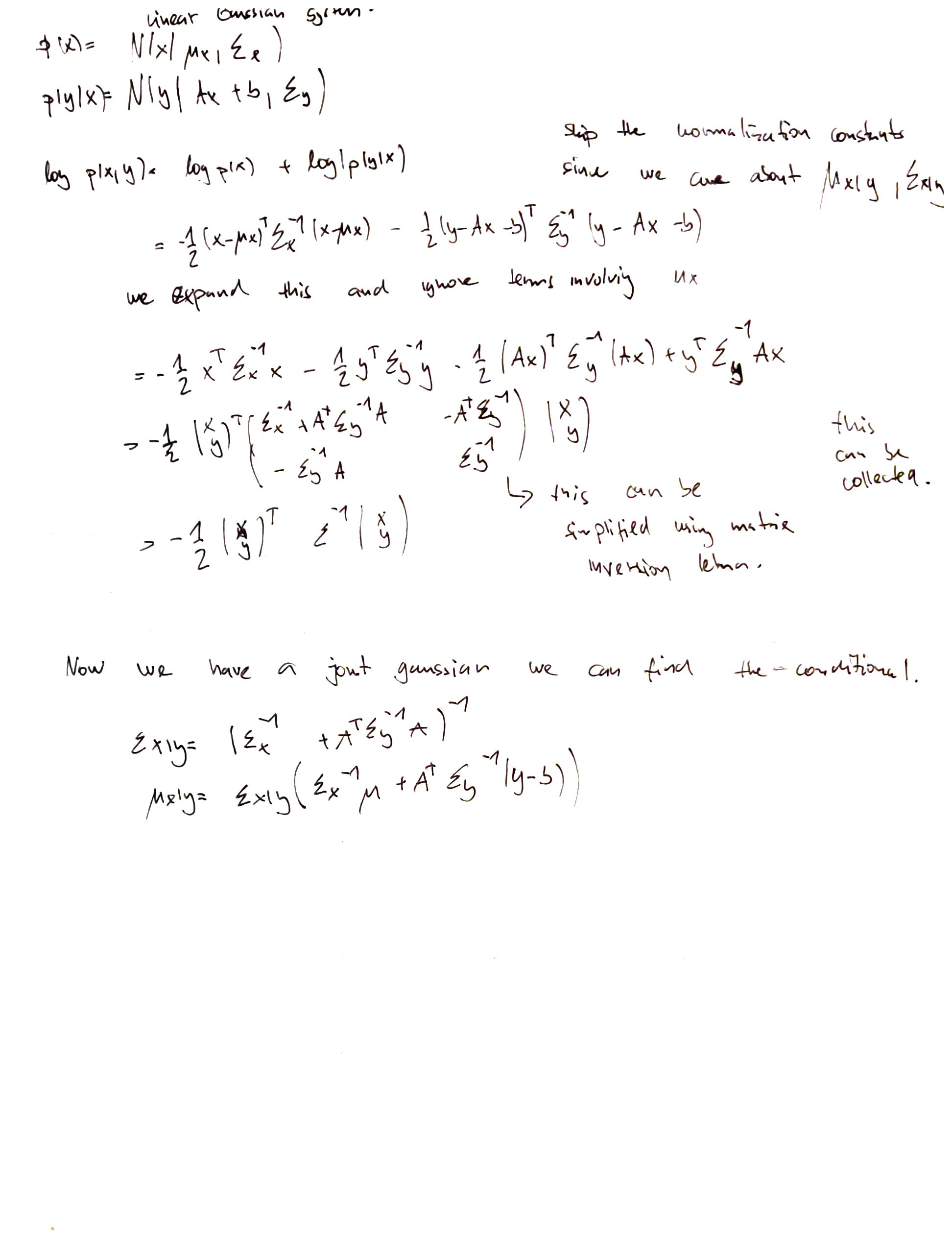
Posterior \(p(x|y)\) is given by:
Normalization constant:
Proof:¶
Applications:¶
Inffer unknown scalar from noisy measurement. Here we simply assume that \(p(y_i|x) = \mathcal{N}(y_i | x, \lambda_y^{-1})\). Here we fix the precission to some value \(\lambda_y = 1/\sigma^2\) And \(p(x) = \mathcal{N}(x| \mu_0, \lambda^{1}_0)\). Our goal is to compute: \(p(x| y_1, y_2, \cdots, y_n| \sigma^2)\). Thus we get get that: $\(p(x|y) = \mathcal{N}(x| \mu_N, \lambda_N^{-1})\)\( \)\(\lambda_N = \lambda_0 + N \lambda_y\)\( \)\(\mu_n = \frac{N\lambda_y}{N\lambda_y + \lambda_0} \bar{y} + \frac{\lambda_0}{N\lambda_y \lambda_0} \mu_0\)$
Inferring an unknown vector from nosiy measurmenet. Here ve consider an N vector-valued ovservations \(y_i \sim \mathcal{N} (x, \Sigma_x)\) amd a Gaussian prior \(x \sim \mathcal{N}(\mu_0, \Sigma_0)\). We set \(A =I, b=0\) and we use \(\bar{y}\) for the ffective observation with precission \(N\Sigma_y^i\) we get: $\(p(x|y_1, \cdots, y_N) = \mathcal{N}(x| \mu_N, \Sigma_N) \)\( \)\(\ \)\( \)\( \Sigma^{-1}_N = \Sigma_0^{-1} + N \Sigma^{-1}_y\)\( \)\( \mu_N = \Sigma_N(\Sigma_y^{-1} (Ny) + \Sigma_0^{-1}\mu_0)\)$
Here we can think that x represents the true, unknown, location of an object in 2d space. And y are noisy measurements. This can be extended for moving objects using Kalman filters. We can also express this in a case that we have multiple senseros. This combination is called sensor fusion.
Interpolating noisy data. We assume that we obtained N noisy observations \(y_i\), without loss of generality we assume that they belong to \(x_1, x_2, x_3, \cdots, x_N\). We can model this as a linear Gaussian system: $\(y = Ax + \epsilon\)$ Where:
\(\epsilon \sim \mathcal{N}(0, \Sigma_y)\)
\(\Sigma_y = \sigma^2I\), \(\sigma^2\) is the observation noise.
\(A\) is a \(N \times D\) projection matrix that selects out the observed elements.
The posterior can be found by solving the following optimization problem: $\(\min_x \frac{1}{2\sigma^2} \sum_{i=1}^N (x_i - y_i)^2 + \frac{\lambda}{2}\sum_{i =1}^D [(x_j - x_{j-1}) + (x_j - x_{j+2}^2)] \)$